


---项目人黄鹏
本项目研发了一种平动式关节机器人,通过大小臂与减速器的一体化设计及新型的易于普及的控制系统、而形成一种有别于传统的教学机器人。通过3组平行四边形机构实现被抓取物在运动过程中始终处于水平状态(腕关节平动),以解决平动问题、手臂过重问题、计算复杂不易推广的问题及以及控制复杂、成本高的问题,便于教学。通过三个步进电机带动实现腰关节、肩关节、肘关节的运动,通过数学模型或示教实现三轴的旋转运动与直角坐标之间的转换。该项目将解决机械爪平动问题、载重问题、教学中的机器人结构观察问题、计算复杂不易推广的问题以及控制复杂问题。机器人设有内、外部传感器,使用安全你可靠。
机器人在一米的工作半径内,抓取3公斤以内的重物,工件定位精度<2mm,通过触摸屏操作,控制PLC完成示教及各种操作。是一种高性价比的教学系统,可单独使用,也可用于教学生产线、柔性制造系统。
附:教学型平动机器人及控制系统图片:
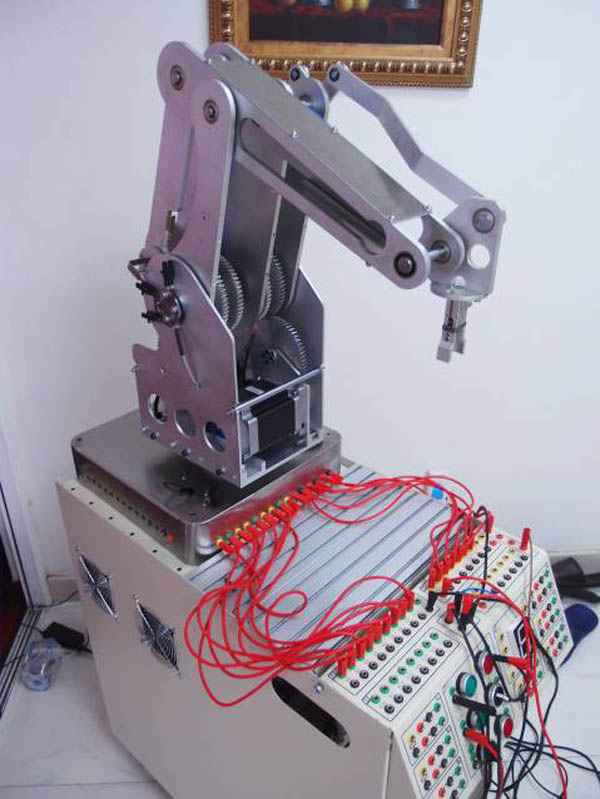
图1 机器人全图

图2 机器人的电机及传动系统结构

图3 电气控制系统全图(不包含触摸屏)
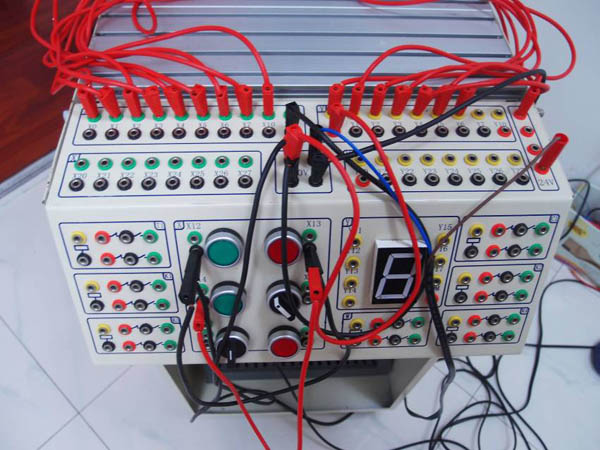
图4机器人的I/O接口及输入按钮和七段显示输出

图5 机器人的控制系统:PLC及执行开发的通用I/O接口板
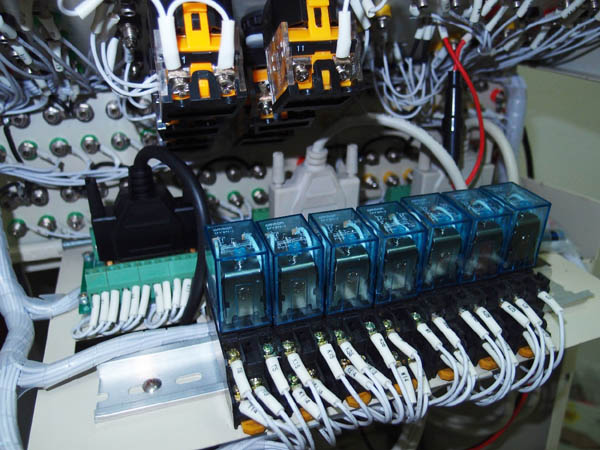
图6 I/O接口所用的控制箱

图7 步进电机驱动控制箱及气动控制阀

图8 三个步进电机及传感器


 粤公网安备 44030402005468号
粤公网安备 44030402005468号